Schémas techniques et de principe d’un paramoteur électrique
Dans cet article, nous avons regroupé les schémas techniques et de principe d’un paramoteur électrique.
Principe général
Dans cet article, nous vous expliquons les grands principes du paramoteur électrique FlyingOhm.
Pour ceux ayant déjà fait de l’aéromodélisme, certains concepts leurs seront très familiers car le principe est similaire.
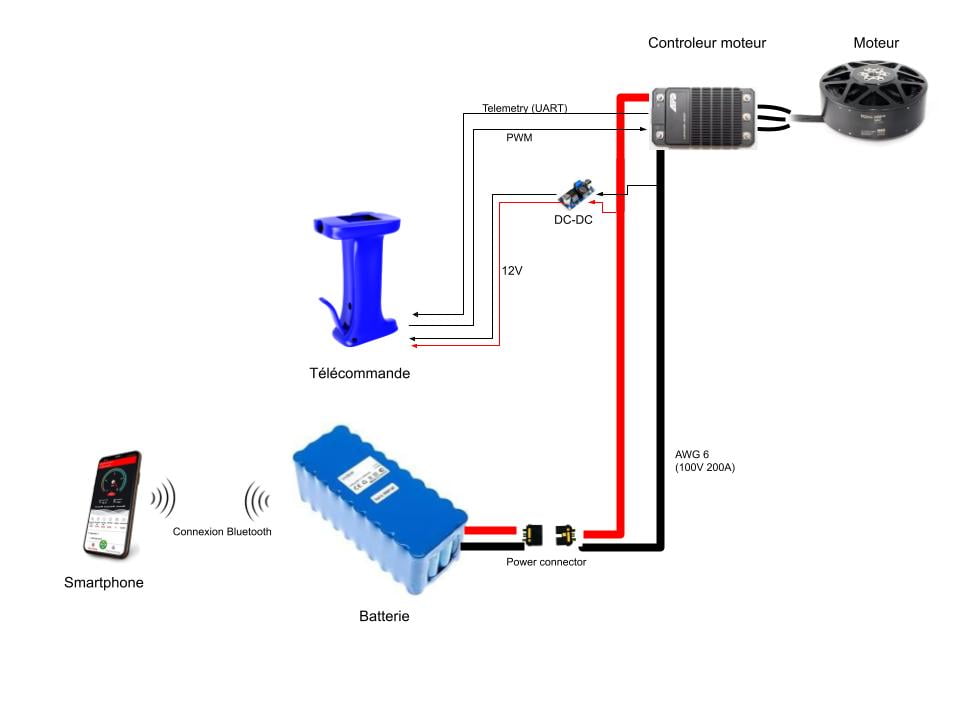
Dans cet article nous présentons les interfaces entre le moteur, le contrôleur moteur, la batterie, et la télécommande.
Pour commencer, le schéma que nous présentons ici donne une vision globale des interconnexions entre les composants. Dans la suite de cet article, nous allons voir en détail chaque interface.
Vous comprendrez vite, que les paramoteurs électriques sont beaucoup plus simples en terme d’interfaces que les moteurs thermiques…
En cas d’anomalie, il est donc très facile de déceler le problème. Pour cela, il suffit simplement d’analyser les connexions entre les différents éléments !
Note : Cet article que nous vous présentons est représentatif du Flying Ohm V2. La version V1 était différente, notamment les interfaces avec la télécommande.
Connexions entre le moteur et son contrôleur
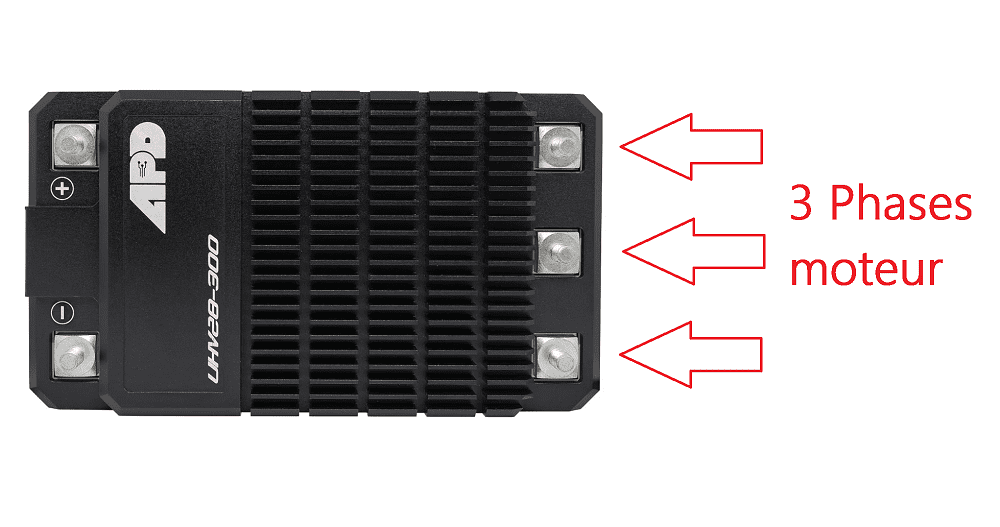
La connexion entre le moteur et le contrôleur est simple.
Il n’y a que trois câbles (un câble par phase du moteur).
Puisque le contrôleur est configurable de façon logicielle, il n’est pas possible de se tromper sur le montage. Si l’hélice tourne dans le mauvais sens alors le logiciel du contrôleur permet de l’inverser.
Nous ne rentrerons pas dans le détail du type de courant, car il existe un article dédié sur le contrôleur moteur.
Enfin, concernant la connexion mécanique, nous vous conseillons des câbles les plus courts possibles (la longueur fournie d’origine avec le moteur est suffisante).
Connexions entre la batterie et le contrôleur moteur
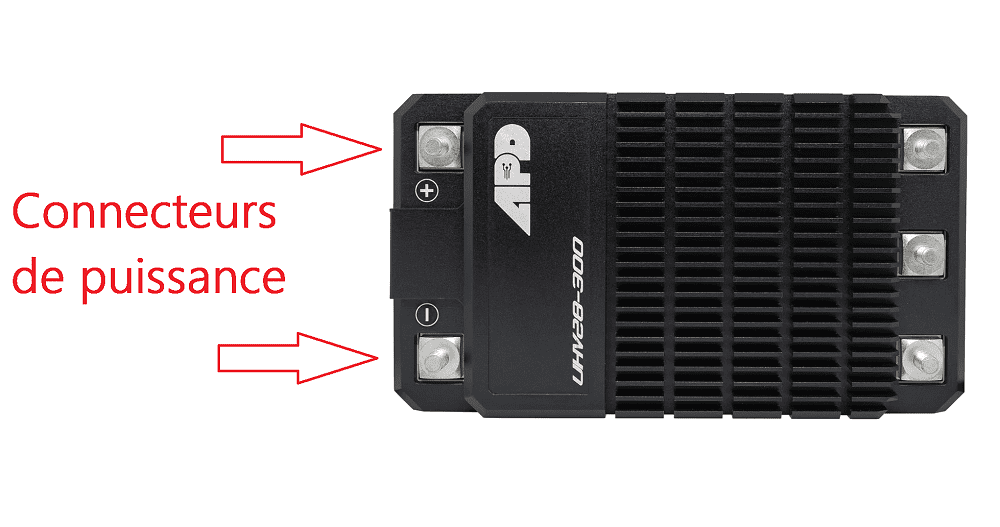
Vous pouvez voir sur cette photo que le contrôleur moteur est alimenté directement par la batterie via deux câbles de puissance (type AWG6 silicone).
Un connecteur est présent entre les deux pour pouvoir débrancher la batterie.
Ces câbles sont ceux utilisés pour fournir la puissance.
Cependant pour éviter les phénomènes d’inductance (qui pourrait endommager le contrôleur moteur), nous vous conseillons une longueur de câbles la plus courte possible.
Connexions avec la télécommande
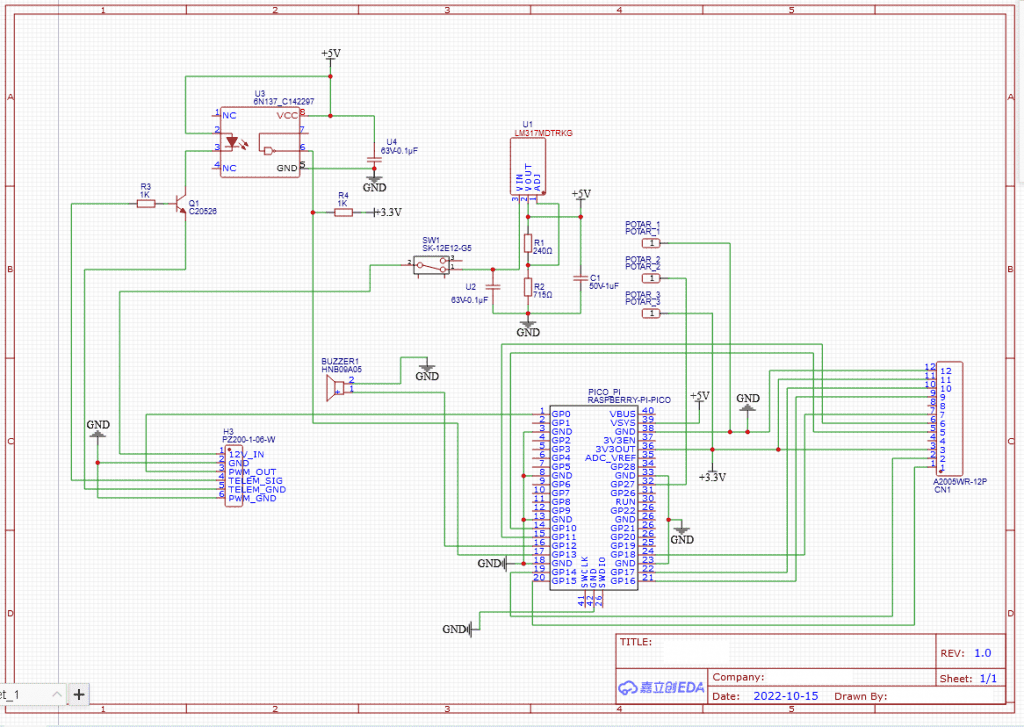
La télécommande est l’élément central de l’architecture.
Le lien entre la télécommande et la batterie permet uniquement d’alimenter la télécommande. La tension d’entrée acceptable par la télécommande est comprise entre 5V et 40V. Cependant la batterie étant comprise entre 70V et 100V, il est donc nécessaire d’abaisser sa tension.
Nous avons donc placé un convertisseur DC-DC entre la télécommande et la batterie qui fournit une tension de 12V à la télécommande.
En revanche, l’interface entre la télécommande et le contrôleur est plus complexe.
- Le premier lien concerne l’envoi du signal PWM (Pulse Width Modulation) de la télécommande vers le contrôleur. Ce signal PWM (je vous renvois vers cet article si vous souhaitez en savoir plus) indique au contrôleur moteur la puissance moteur désirée (0%-100%). 3 fils sont utilisées pour envoyer ce signal : le GND, le 5V, et le signal PWM.
- Le second lien permet de récupérer les informations du contrôleur (ce que l’on appelle la télémétrie). Attention, le contrôleur moteur n’est pas isolé électriquement sur cette interface. Il faut donc bien isoler le signal par un optocoupleur. 2 fils sont utilisés : Le GND de la télémétrie, et le signal de la télémétrie.

Connexion entre la batterie et le smartphone
Enfin pour conclure, la dernière interface (non négligeable) est celle entre la batterie et le smartphone.
Cette connexion est réalisée en Bluetooth et permet de récolter un certain nombre d’informations sur la batterie, mais aussi de la configurer.
Cette configuration est réalisée par nos soins, et ne doit pas être modifiée pour des raisons de sécurité).