La télécommande V1 du paramoteur électrique Flying Ohm
Vous souhaitez en savoir plus sur la télécommande V1 du paramoteur électrique Flying Ohm ? Nous avons rédigé un article pour vous communiquer tous les détails.
En vol, la télécommande est le seul lien direct entre le pilote et le GMP.
Tout d’abord, elle doit être précise, réactive, informative mais surtout sécuritaire !
Sur les poignées de gaz thermique, c’est un câble mécanique qui vient agir sur le carburateur. Ici la télécommande est numérique et communique directement avec le contrôleur moteur.

Open Source
Depuis le début de l’aventure, nous faisons le maximum pour partager nos avancés et décrire le fonctionnement de la machine conçue.
Nous n’avons pas oublié la télécommande au contraire ! Nous avons créé un dépôt sur le site GitHub qui contient toutes les informations nécessaires pour reproduire ou modifier la télécommande. Le lien vers le site ICI.
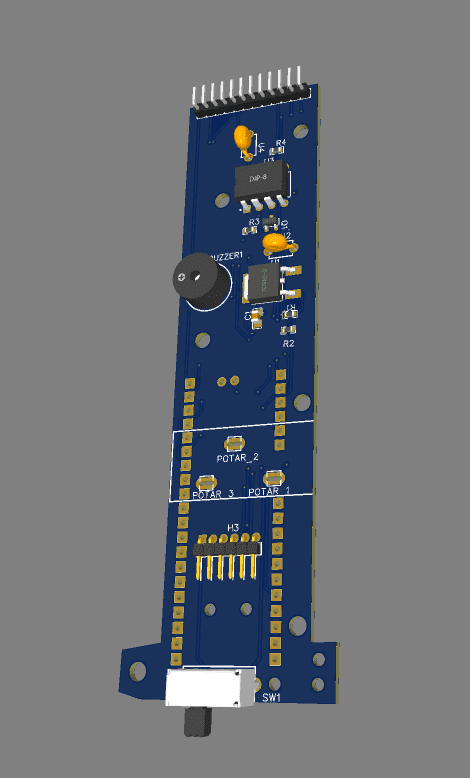
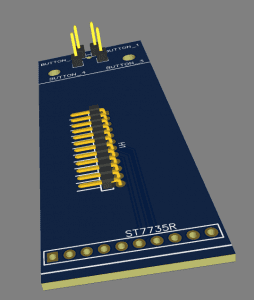
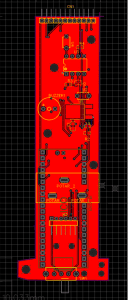
Nous partageons les plans du PCB, le fichier 3D à imprimer, et le code source flashé sur la télécommande.
Ce site permet également de faire les demandes d’évolutions, que nous traiterons par priorité.
N’hésitez plus, venez faire évoluer avec nous la télécommande Flying Ohm !
Précise et réactive
Le potentiomètre integrée dans la télécommande est de haute qualité, et le convertisseur analogique numérique est codé sur 16 bits. Ce qui signifie qu’il y a 65536 positions possibles sur la poignée de gaz, ce qui la rend très précise.
La lecture de la position de la poignée est réalisées toutes les 20ms (soit 50 fois par seconde), la réactivité est donc excellente.

Source d'informations
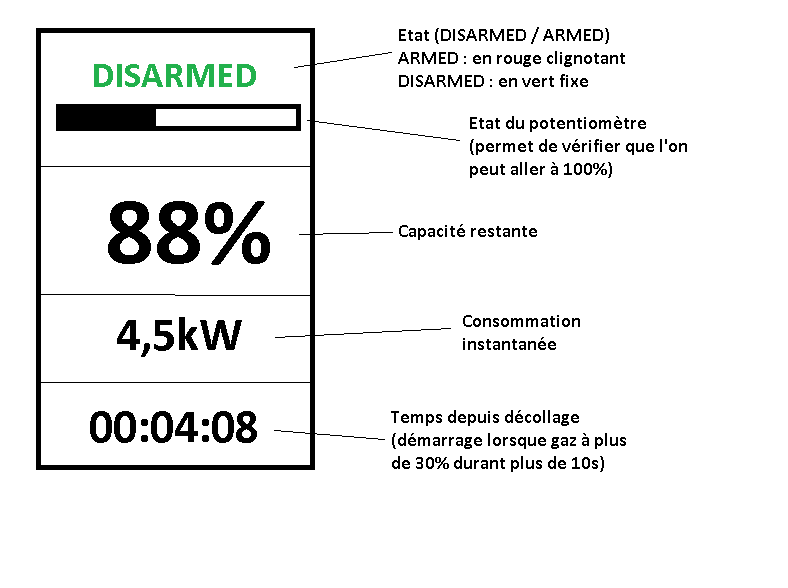
Nous avons intégré un écran TFT à la télécommande pour que le pilote puisse rapidement et distinctement lire les informations utiles.
Les informations utiles : Temps de vol, consommation instantanée, autonomie, etc…
Sécuritaire
La sécurité est essentielle.
La différence avec un paramoteur thermique est qu’en électrique est que l’on n’entend pas le moteur au ralenti. Il n’y pas besoin de préchauffe, et la puissance est disponible immédiatement.
Ainsi, pour activer le moteur il est nécessaire de réaliser une action qui est forcément volontaire. De plus, l’écran affiche si le moteur est armé (en rouge).
Enfin, notre télécommande actuelle est filaire pour plusieurs raisons :
-Le signal envoyé au contrôleur est protégé (pas de brouillage possible comme pour les télécommandes sans fil).
–Pas de latence lié au sans fil.
-En cas de problème, la demande de coupure du moteur est directe.
-Impossible de la perdre.
-Pas besoin de la recharger.
Cependant, nous travaillons sur la réalisation d’une télécommande sans fil. La version filaire n’est peut être qu’une étape (afin de s’assurer dans un premier temps que tout est opérationnel et fiable).