Comment fonctionne un contrôleur de moteur Brushless ?
Découvrez dans cet article comment fonctionne un contrôleur de moteur Brushless. Nous vous expliquons en détail tout ce qu’il faut savoir.
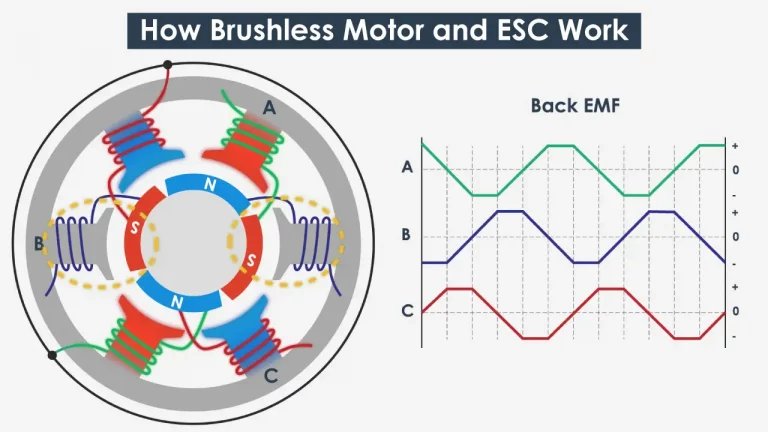
Comment l'invention du moteur Brushless permet au Flying Ohm de voler en électrique ?
Tout d’abord il faut savoir que les moteurs brushless ont révolutionné l’industrie de la motorisation grâce à leurs performances accrues et à leur efficacité supérieure par rapport aux moteurs brushed traditionnels. Vous ne vous en rendez surement pas compte, mais les moteurs brushless sont désormais quasiment dans tous nos produits (voiture, climatisation, disques durs, etc.) Nous vous expliquons ici comment fonctionne un contrôleur de moteur brushless.
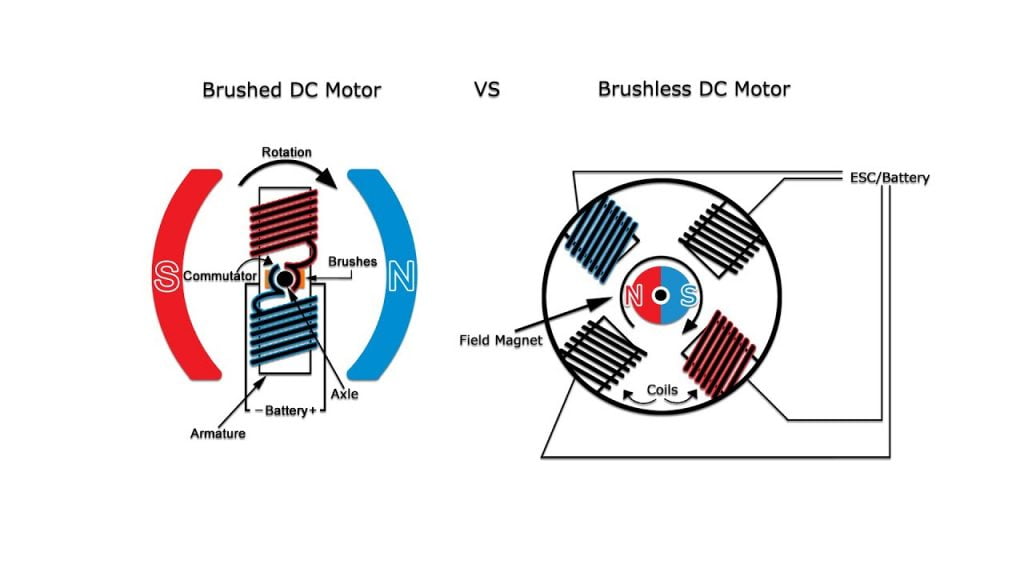
Les moteurs brushless (sans balais) diffèrent fondamentalement des moteurs brushed (avec balais) par leur conception.
Alors que les moteurs brushed utilisent des balais pour établir une connexion électrique avec le rotor, les moteurs brushless éliminent ce frottement mécanique en utilisant un contrôleur électronique (le fameux contrôleur moteur !) pour commuter les bobines du stator.
Cela signifie que le rotor est alimenté en courant continu par une série de commutations électroniques synchronisées avec sa rotation, ce qui élimine le besoin de balais.
En conclusion, les moteurs brushless ont révolutionné le monde de l’aéronautique (et de l’industrie en général).
En un mot, il aurait été impensable de voler en électrique avec un moteur Brushed…R
Les avantages du Brushless
Pour continuer, nous vous présentons ici en détails les avantages des moteurs Brushless :
- Efficacité Supérieure : L’un des avantages les plus notables des moteurs brushless est leur efficacité accrue. Étant donné qu’il n’y a pas de frottement des balais, les pertes d’énergie par échauffement et usure sont considérablement réduites. Cela se traduit par une meilleure efficacité énergétique. Concrètement pour notre utilisation, nous gagnons en d’autonomie, donc par conséquent en temps en vol.
- Puissance et Performance : Les moteurs brushless offrent une puissance plus élevée par rapport à leur taille et poids. Ainsi nous pouvons diminuer au maximum le poids du paramoteur.
- Moins de Maintenance : Les moteurs brushless nécessitent considérablement moins de maintenance par rapport aux moteurs brushed (les balais des moteurs brushed sont des éléments sujets à l’usure). Le paramoteur Flying Ohm ne nécessite quasiment pas d’entretien.
- Contrôle Précis : Les moteurs brushless permettent un contrôle précis de la vitesse et du positionnement. Notre télécommande prend en compte cet avantage en ayant une résolution adaptée (voir notre article dédié sur la télécommande).
En résumé, c’est pour tous ces avantages que nous avons choisi ce type de moteur sur le projet Flying Ohm.

Pourquoi avoir besoin d'un contrôleur moteur ?
Puisque le moteur a changé de conception, son pilotage également doit évoluer. Le pilotage d’un moteur brushless repose sur une technique appelée « commutation ».
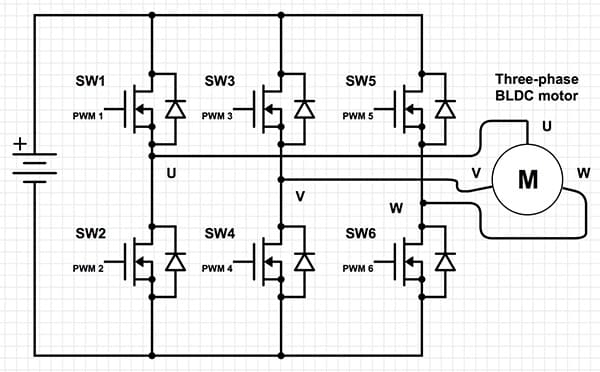
Le schéma que nous vous présentons ici est une vue simplifiée d’un contrôleur moteur Brushless.
On peut voir les trois fils qui correspondent aux trois phases du moteur.
Le courant fourni dans chacun de ces trois fils est conditionné par les MOSFET (représentés ici par SW1, SW2, etc…). Ces MOSFET doivent être pilotés à l’aide d’un micro contrôleur qui joue le rôle de chef d’orchestre.
Principe de fonctionnement d'un contrôleur moteur brushless
Nous vous présentons ici les différentes étapes réalisées par le contrôleur moteur (ou ESC, qui signifie « Electronic Speed Controller ») :
- Détection de la Position du Rotor : L’ESC a besoin de savoir la position actuelle du rotor pour effectuer les commutations appropriées. Le contrôleur que nous utilisons surveille les variations de tension induites dans les phases du moteur.
- Calcul des Moments de Commutation : Une fois que l’ESC a déterminé la position du rotor, il calcule les moments optimaux pour commuter les phases du moteur.
- Contrôle de la Commutation : L’ESC contrôle électroniquement les transistors MOSFET qui fournissent le courant aux phases du moteur. Ce sont principalement ces MOSFET qui font chauffer le contrôleur moteur.
- Régulation de la Vitesse : En ajustant la fréquence et la durée des commutations, l’ESC contrôle la vitesse du moteur brushless. En augmentant la fréquence des commutations, l’ESC peut augmenter la vitesse du moteur, et en la réduisant, il peut la diminuer.
- Gestion de la Puissance : L’ESC ajuste également la puissance électrique fournie au moteur pour obtenir la vitesse et le couple souhaités. Cela peut être réalisé en modifiant la durée pendant laquelle le courant est envoyé.



Caractéristiques d'un contrôleur moteur
Pour terminer, nous ne pouvons pas sélectionner n’importe quel ESC pour n’importe quelle application. Voici les caractéristiques principales à prendre en compte pour le choix d’un ESC :
Tension nominale (Voltage) : L’ESC doit être compatible avec la tension nominale du système électrique dans lequel il sera utilisé. Dans le cas du Flying Ohm, nous sommes alimentés en 24S (le contrôleur que nous utilisons accepte 28S).
Courant (Ampérage) : L’ampérage maximal que l’ESC peut gérer est une caractéristique cruciale. Il doit être en mesure de supporter le courant nécessaire pour alimenter le moteur brushless à pleine puissance. Le contrôleur moteur que nous avons choisi accepte jusqu’à 300A en continue (notre moteur peut consommer environ 200A au maximum). Dans le cas ou le contrôleur est sous dimensionné par rapport au besoin, il se mettra à chauffer et se mettra en sécurité (dans le meilleur des cas).
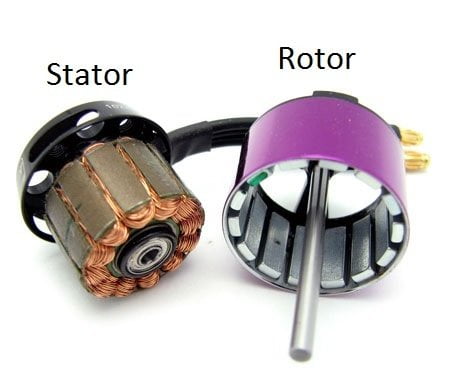
Type de Moteur Supporté : Les ESC sont conçus pour des types spécifiques de moteurs brushless, tels que les moteurs à aimants intérieurs (inrunner) ou extérieurs (outrunner). Le moteur que nous avons sélectionné est lui un moteur outrunner.